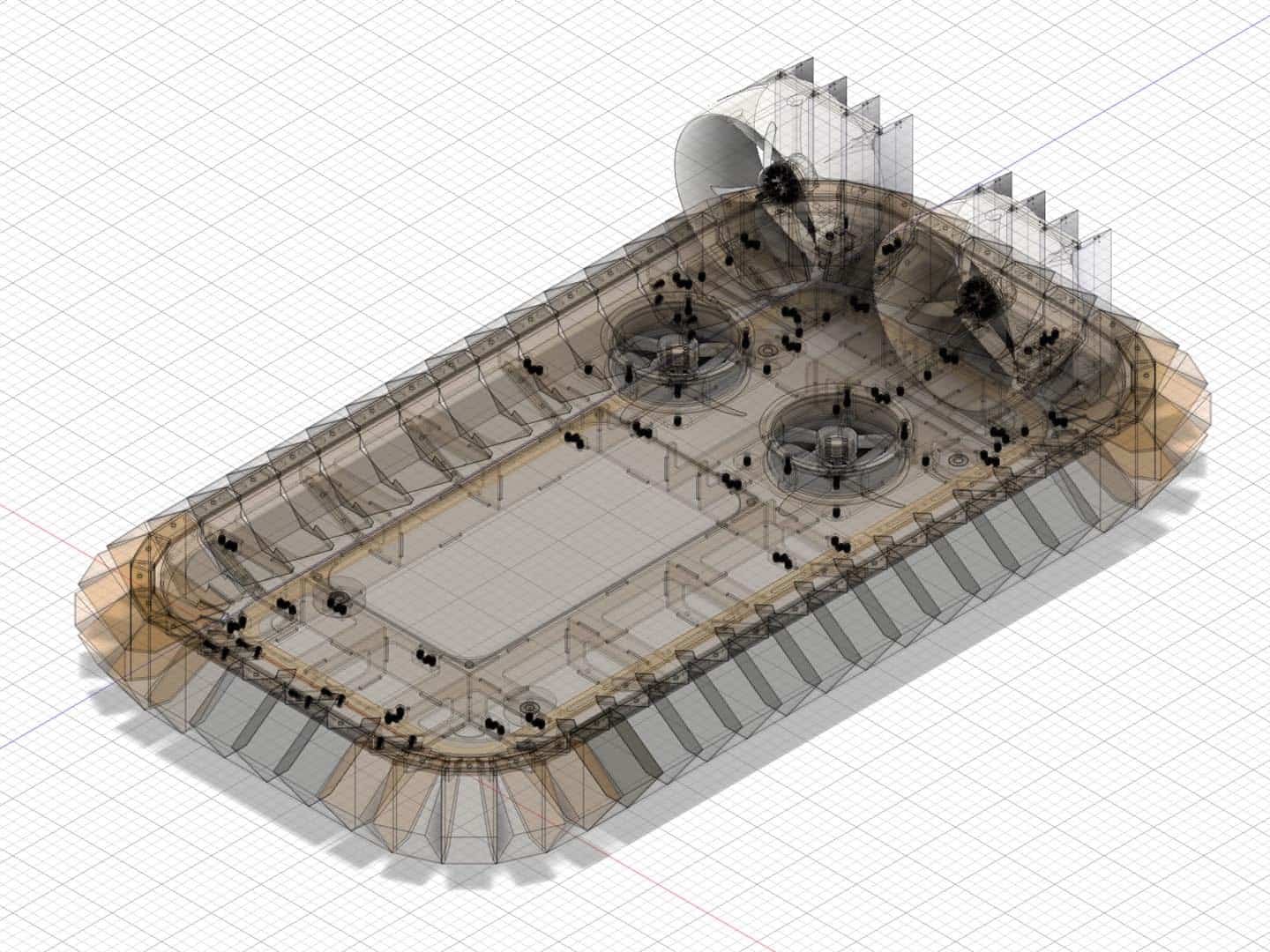
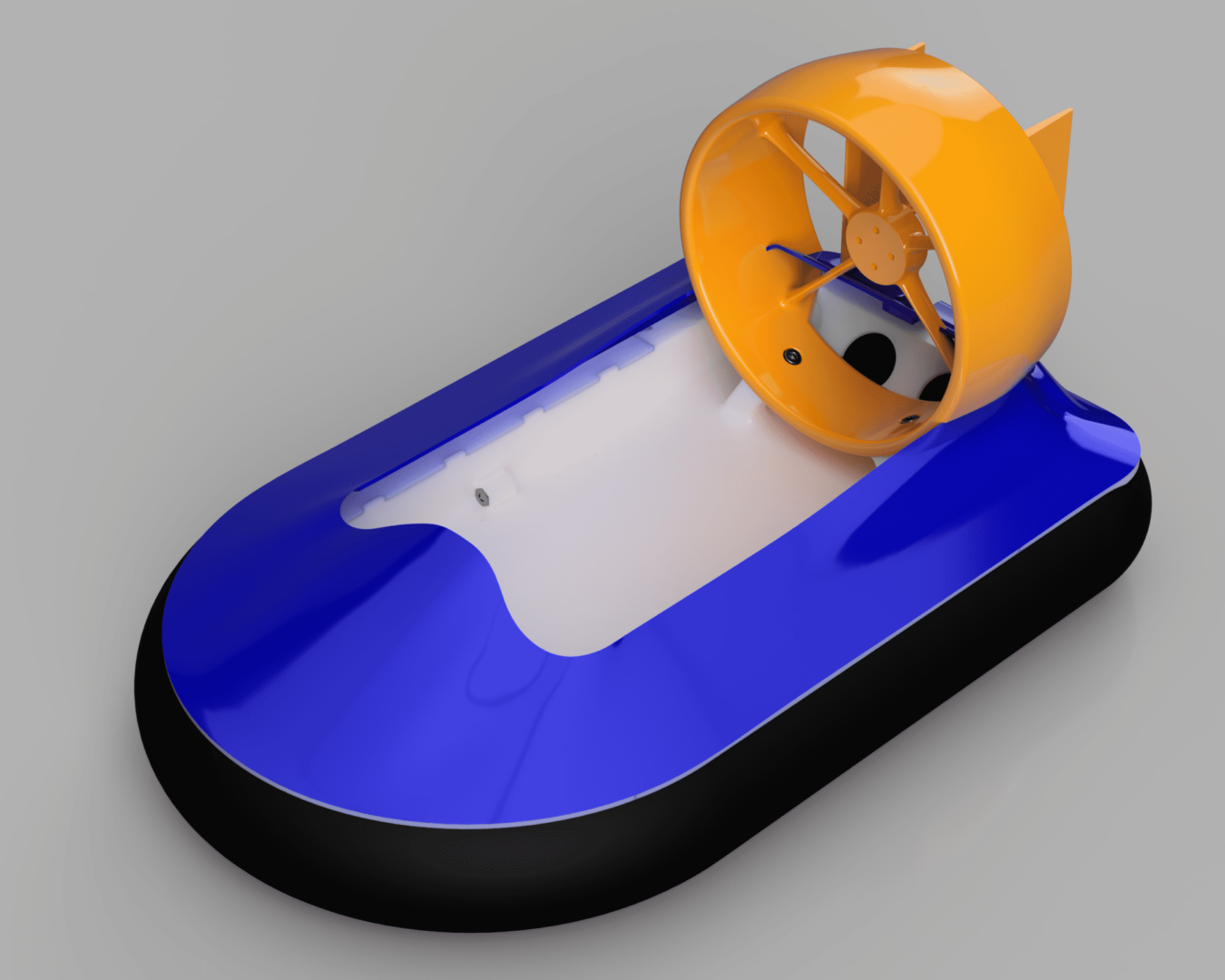
Nach dem Weihnachtsprojekt RC Hovercraft aus dem 3D Drucker hat mich das Hovercraft Thema nochmal mehr in seinen Bann gezogen und ich habe begonnen mein ursprüngliches Projekt basierend auf ME 218C der Standford University komplett in Fusion 360 neu zu konstruieren.
Der eigentlichen Konstruktion ging ein enger Austausch mit Alex Händel, welchen ich über seine veröffentlichten Modelle auf GrabCAD kennengelernt habe, sowie eine intensive Recherche der Tipps und Empfehlungen von Stefan Tulodziecki, dem Autor des Buches Luftkissenboote als Modell, voraus.
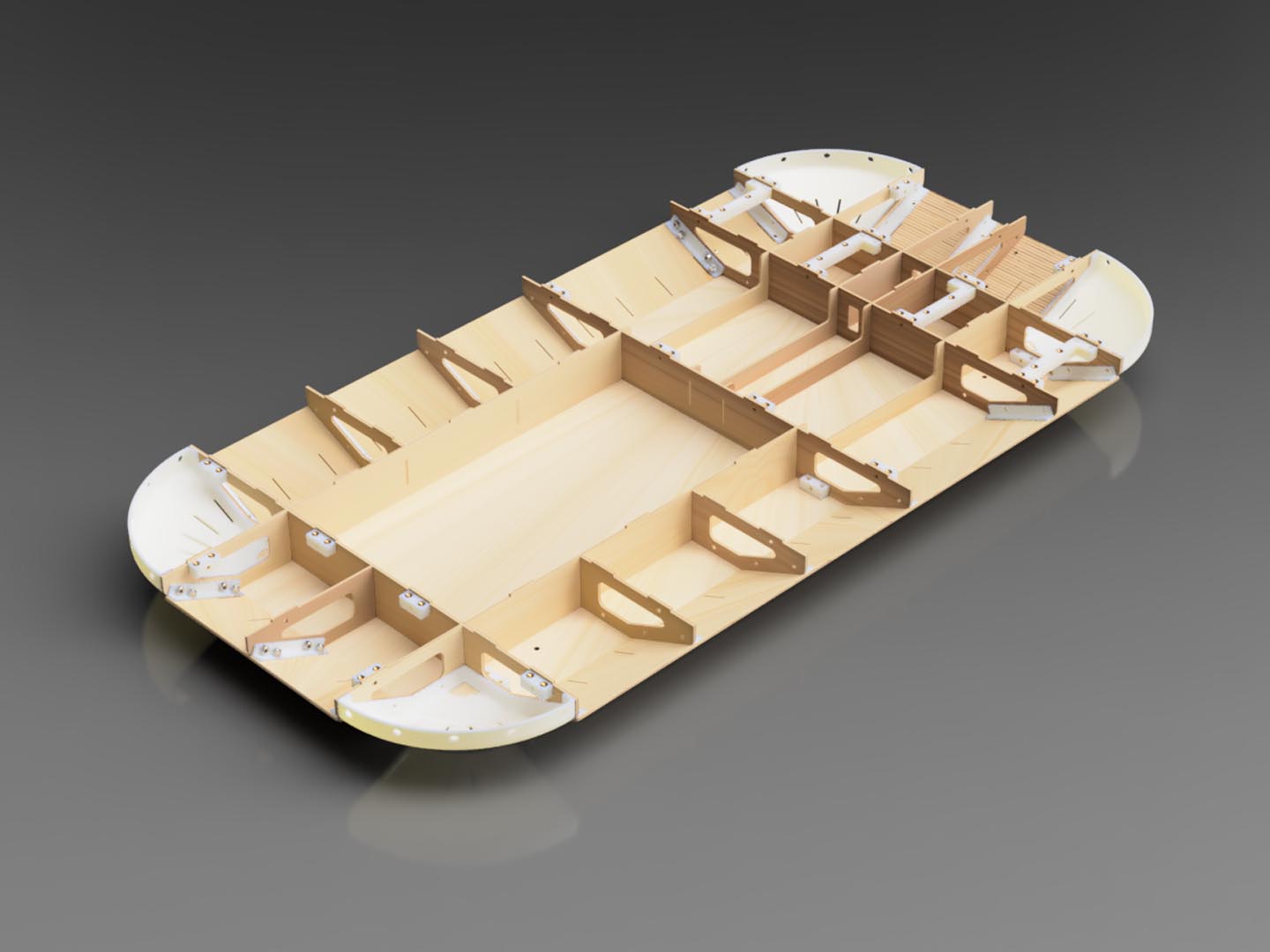
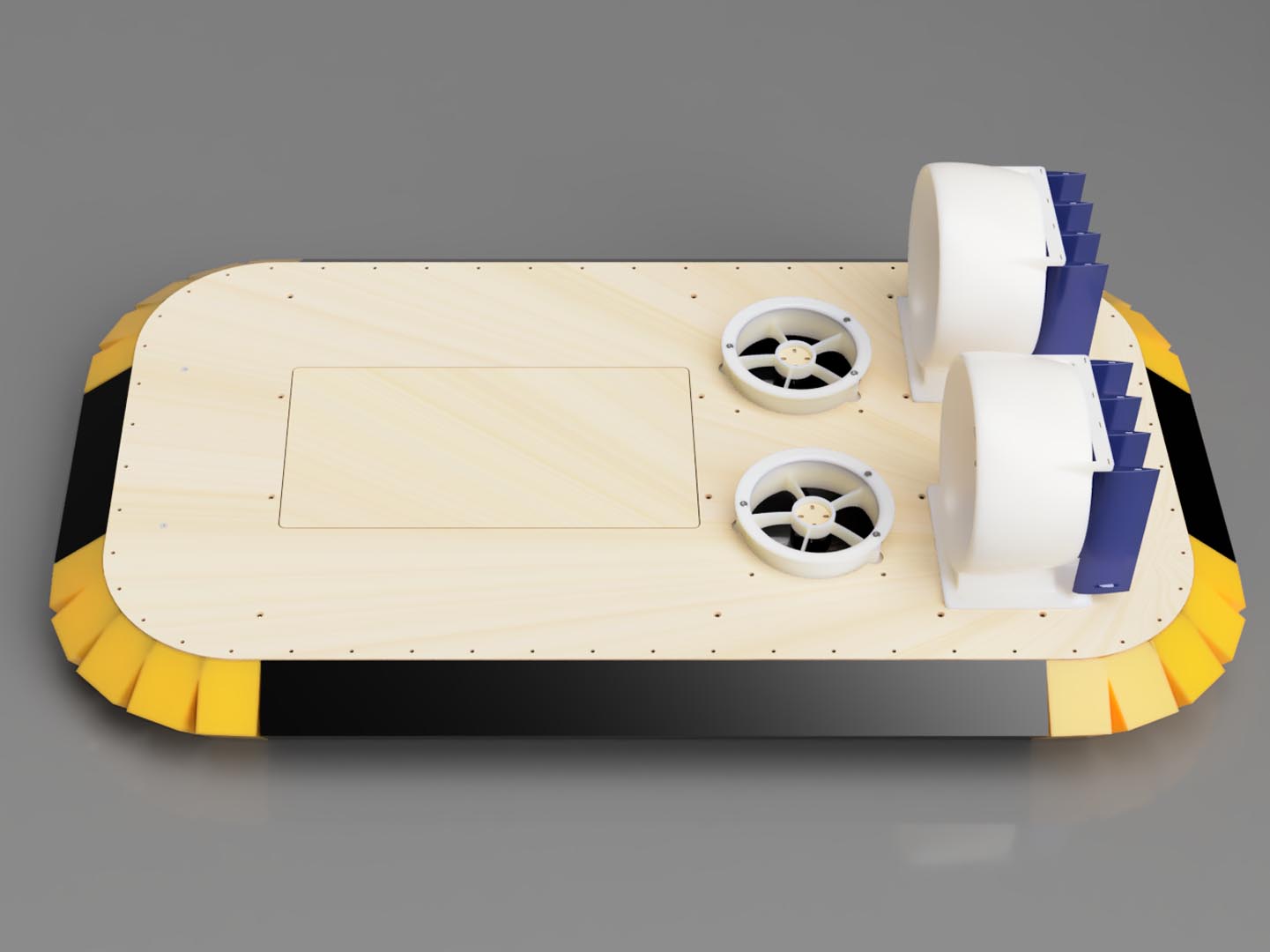
Die kompakten und guten Fusion 360 – Grundlagen Videos vom YouTube Kanal know-how-schmiede waren sehr hilfreich bei der Einarbeitung in Fusion 360. Ohne die vielen Konstruktions-Beispiele und Tipps von Alex wäre ich allerdings nicht so schnell in der Umsetzung gewesen. Bei dem RC Hovercraft Grundfläche (750×400 mm) habe ich mich an der Arbeitsfläche des Sculpfun S6 Pro Lasers und dem Druckbereich des 3D Druckers Bambu Lab X1 orientiert, damit ich keine Baugruppen unnötig teilen musste.
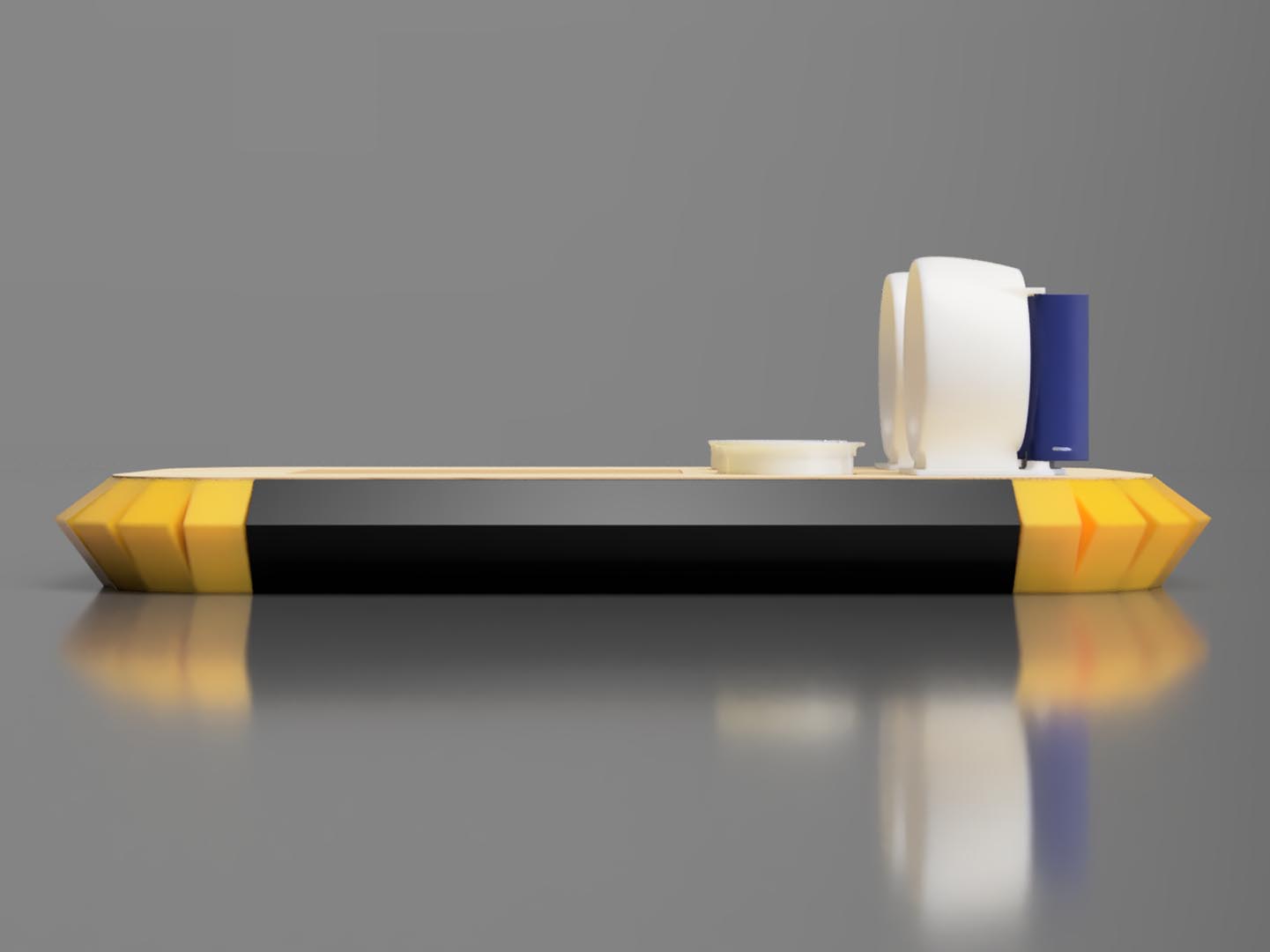
Beide Modellbauer haben mir empfohlen das RC Hovercraft drehmomentneutral zu konstruieren, also die Hub- und Antriebseinheit mit gegenläufigen Motoren auszustatten. Darüber hinaus sollte der Schwerpunkt so weit wie möglich nach unten verlagert werden, was einige grundsätzliche Konstruktionsänderungen mit sich gebracht hat. Zusätzlich wurde der ursprünglich Plan, mit 4 mm Balsaholz zu arbeiten, verworfen und in der Konstruktion 2 mm Birke Flugzeugsperrholz vorgesehen.
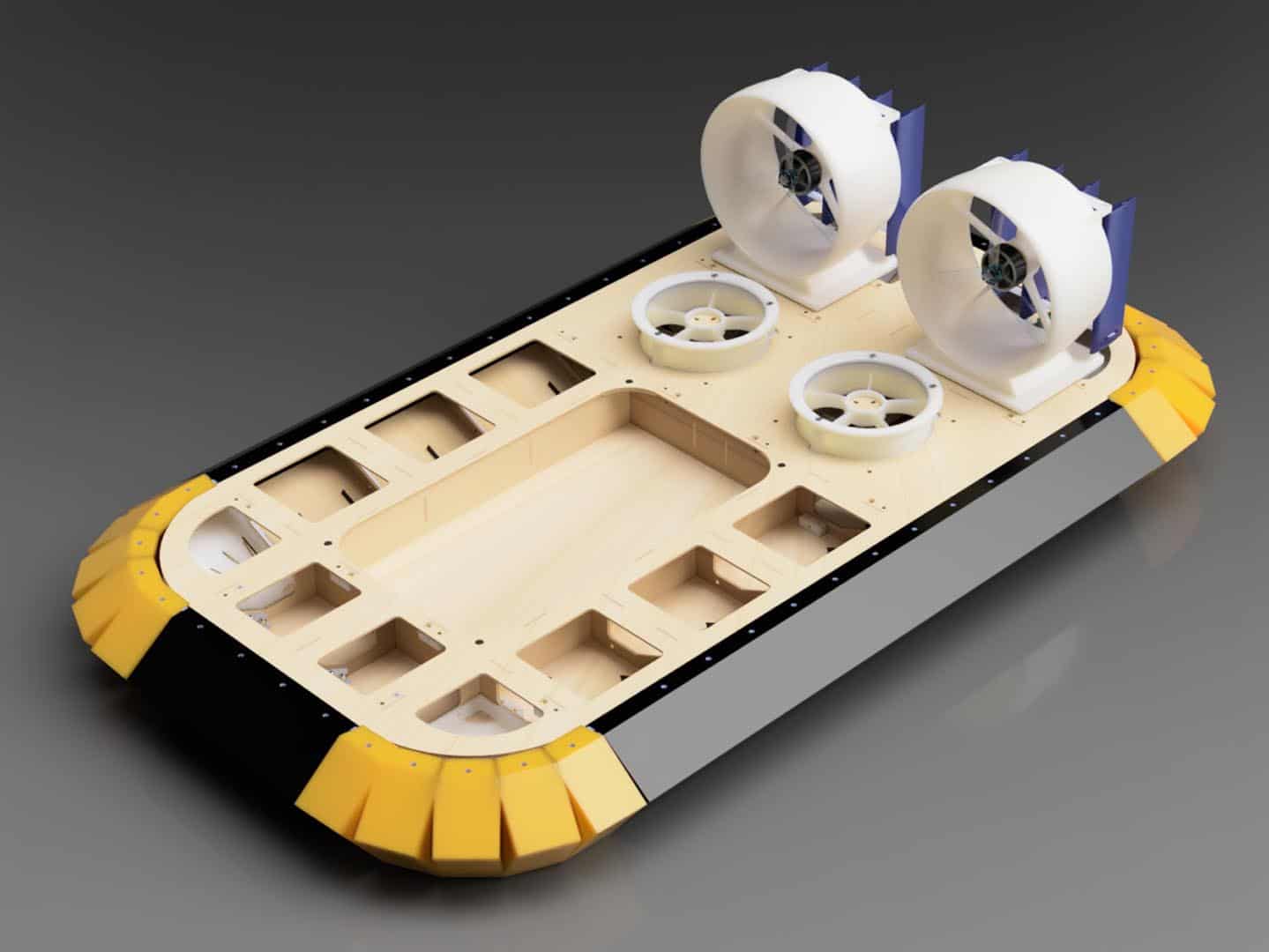
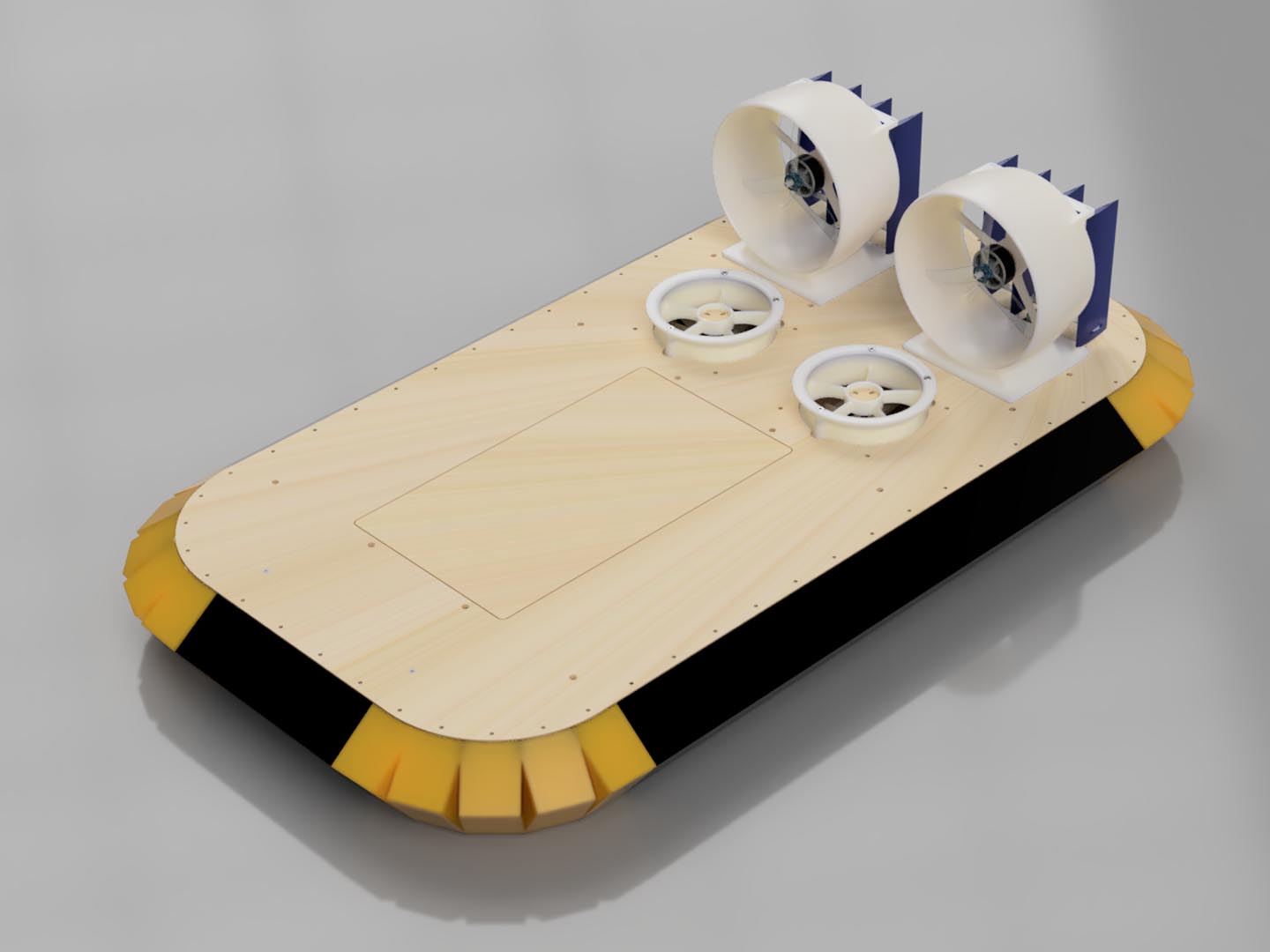
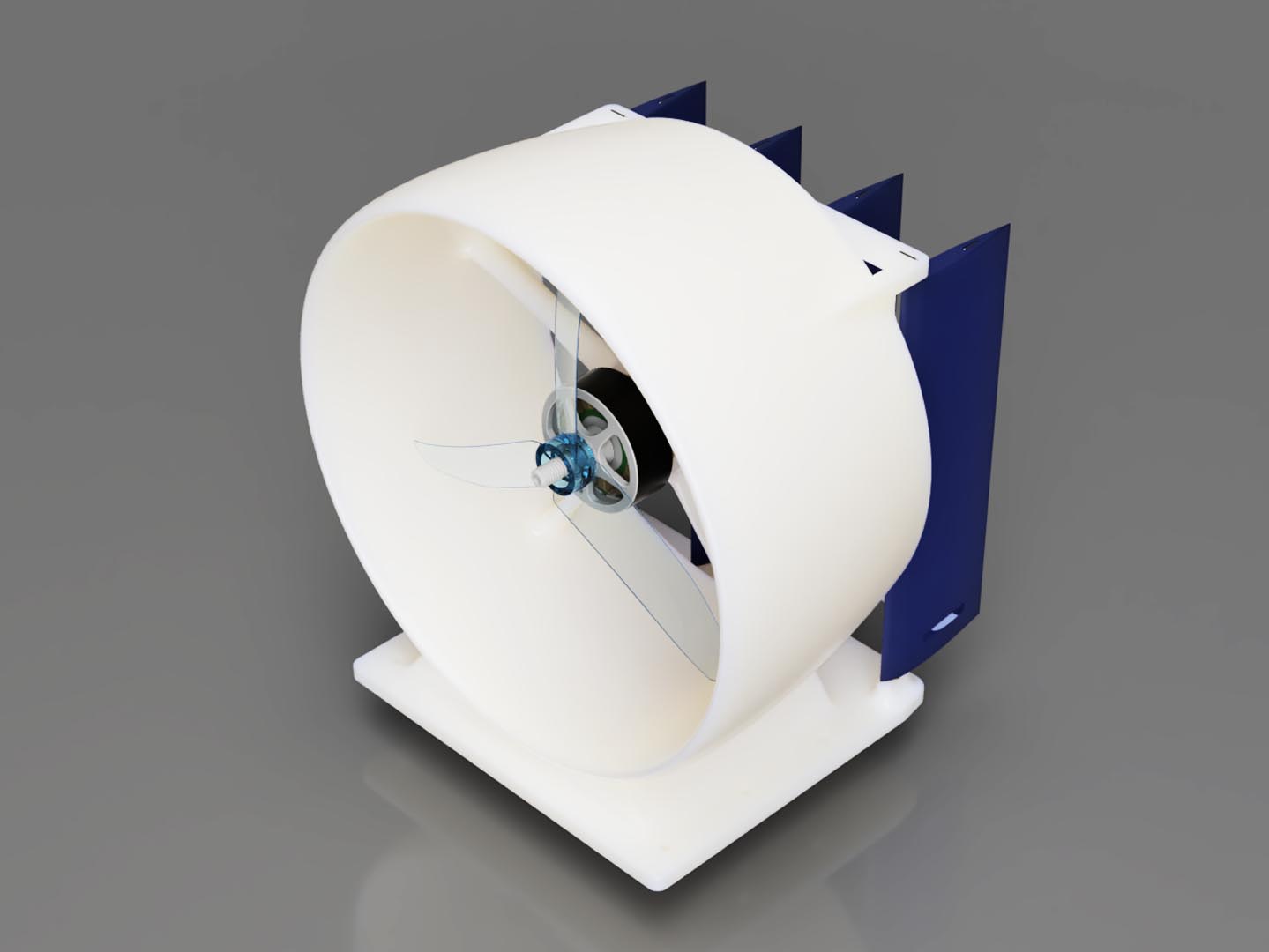
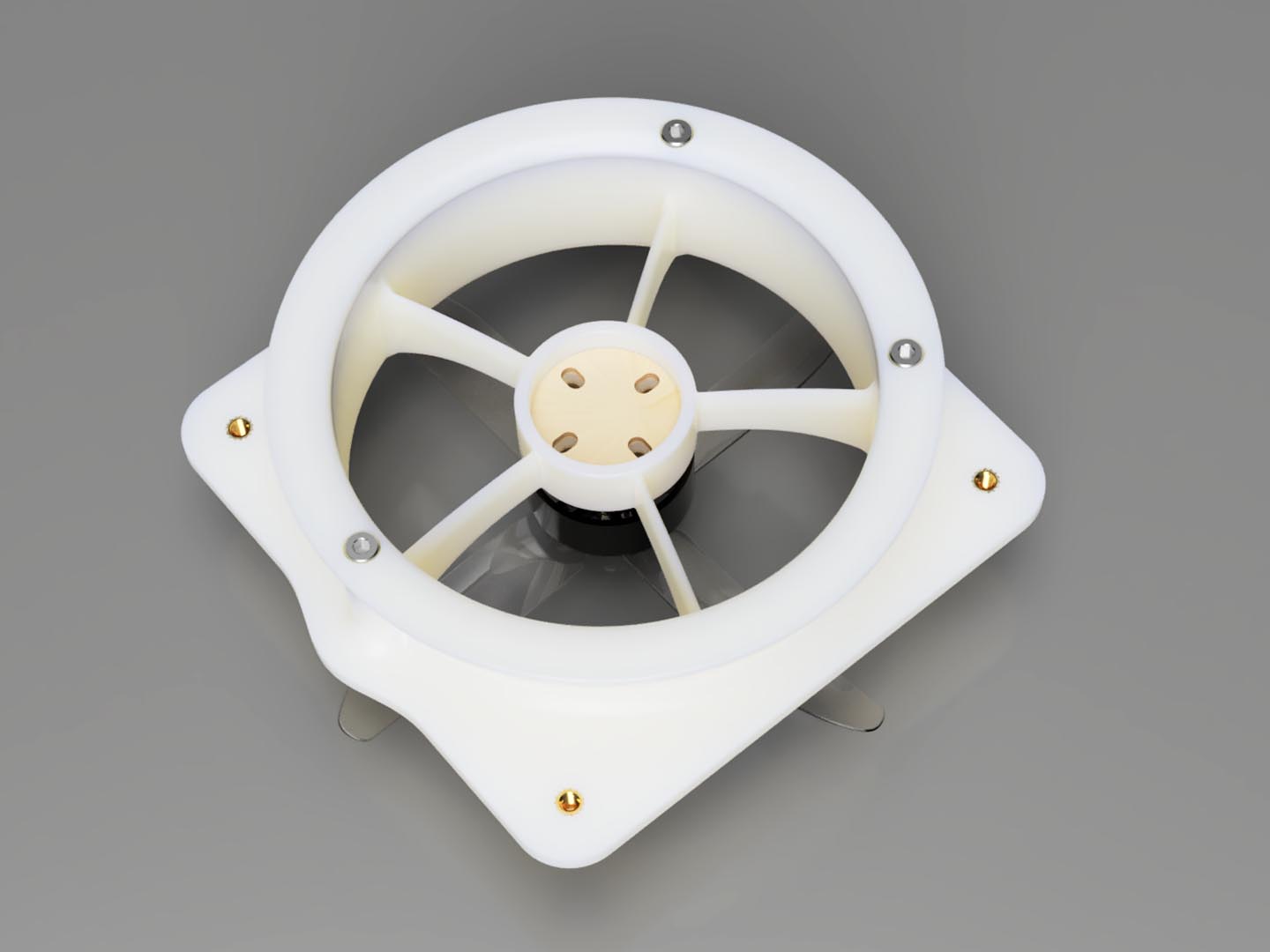
Bei den zwei Hub- und Antriebseinheiten sollen jeweils die 6S Long Range Brushless Motoren F90 von T-Motor zum Einsatz kommen. Als Regler sind vier Tekko32 F4 45A ESC von Holybro vorgesehen, da deren BLHeli32 Firmware ein vorwärts- und rückwärtsfahren unterstützt. Bei den Propellern sollen die 6-Blatt-Propeller HQProp 5X4X6 bei der Hubeinheit und die 3-Blatt-Propeller HQ Freestyle Prop 5X4.3X3V2S bei der Antriebseinheit verwendet werden.
Nach mehreren Iterationen mit unterschiedlichen Positionen der Hubeinheiten und Versuchen in Fusion mit 3″ bis 6″ Propellern werde ich mit dem jetzigen Stand den ersten Prototypen aufbauen.